【戦略的導入ガイド】フィジカルAI×産業用ロボット:既存資産を活かす3段階のアップグレード戦略
 AIエージェントナビ編集部
AIエージェントナビ編集部
製造現場の労働力不足が深刻化する中、従来の産業用ロボットでは対応しきれない「非定型業務の自動化」が喫緊の経営課題となっています。本記事では、既存の設備を活かしながらAIを導入し、中長期的な収益性を最大化するための具体的なロードマップを解説します。
目次
【基礎知識】フィジカルAIと産業用ロボットがもたらす産業構造の変革
製造業は今、ハードウェア中心の時代から、AIがOS(基本ソフト)のように機能を拡張し続けるプラットフォーム型の時代へと移行しています。
なぜ今「フィジカルAI」なのか:ハードウェアからプラットフォーム型への移行
かつての製造現場は、NVIDIAのようなAI基盤を構築する企業と、ファナックや安川電機のようなハードウェアを供給する企業が分断されていました。しかし現在は、両者の「垂直統合(異なる階層を一体化して管理する戦略)」が進んでいます。PCの中に優秀なアシスタントが住み着き、ロボットの目となり頭脳となることで、単なる自動機械が「環境を理解し、判断するエージェント」へと進化しているのです。
従来の産業用ロボットとの決定的な違い:プログラム固定から自律適応へ
従来のロボットは「ティーチング(教え込まれた通りの動作)」しかできませんでした。対してフィジカルAIを搭載したロボットは、作業環境の変化や対象物の微妙な差異を自ら認識します。
| 比較項目 | 従来のロボット | フィジカルAI搭載ロボット |
|---|---|---|
| 動作の柔軟性 | 固定(プログラム通り) | 適応(状況判断が可能) |
| 環境変化 | 対応不可(停止する) | 対応可能(リアルタイム補正) |
| 導入ハードル | プログラミングの専門知識必須 | 自然言語や模倣学習で制御可能 |
関連記事:【2026年最新】失敗しないAIエージェント選定・導入ガイド|MCP対応と業務自動化の判断軸
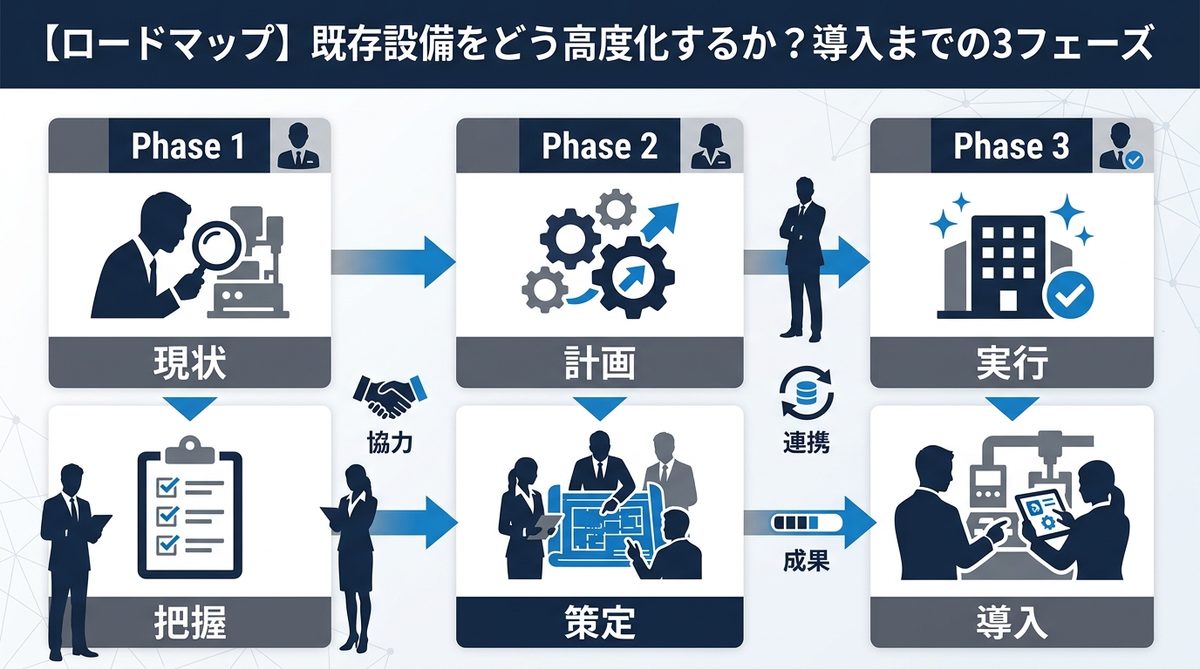
【ロードマップ】既存設備をどう高度化するか?導入までの3フェーズ
一足飛びに最新鋭の自律型ロボットを導入するのはリスクが高すぎます。既存の投資を無駄にせず、段階的にAIの恩恵を取り入れる戦略が重要です。
Phase 1:既存機へのエッジAI搭載による最適化とデータ収集
まずは、既存の産業用ロボットのコントローラーに「エッジAI(現場の機器側でデータ処理を行うAI)」デバイスを接続します。これにより、これまで可視化されていなかった「チョコ停(微小な停止)」の原因特定や、稼働効率のリアルタイム監視を行います。これは「ロボットを賢くするための基礎体力をつける期間」と捉えてください。
Phase 2:デジタルツイン(Isaac Sim等)を活用したプロセスの仮想学習
次に、仮想空間上に現実の工場を再現するデジタルツインを活用します。NVIDIAの「Isaac Sim」などを利用し、実機を動かす前にAIに学習(シミュレーション)をさせます。これにより、現実世界で何千回もの試行錯誤を繰り返すリスクと時間を削減できるのです。
Phase 3:世界モデル(World Model)による自律型AIロボットへの移行
最終段階では、ロボットが物理法則や環境の因果関係を理解する「世界モデル(AIが周囲の状況を予測・理解する内部モデル)」を導入します。これにより、初めて見る部品であっても形状を推論し、自律的に把持(掴むこと)や配置を行えるようになります。
【経営視点】投資判断を左右するROI算定とコスト構造
AI投資は「コスト」ではなく「労働力不足による損失回避」という観点で評価しなければなりません。
初期投資の内訳と中長期的な費用対効果(ROI)の算出ロジック
初期費用はハードウェアに加え、AI学習環境の構築コストが占めます。しかし、算定にあたっては以下のROI(投資利益率)ロジックを用います。
- コスト削減効果: 定型業務の自動化に伴う人件費の低減(3年で約X%)
- 損失回避効果: 稼働率向上による機会損失のゼロ化(ダウンタイム削減)
- 品質安定化: AIによる異常検知で不良品発生を最小化し、歩留まりを改善
人件費削減・品質安定・機会損失の回避をどう数値化するか
「人間が深夜帯に行っている作業」を自動化した場合の費用を基準に計算してください。例えば、月間300時間の労働をAIが肩代わりする場合、教育コストや社会保険料を含めたコストと、AI導入費(デバイス代+保守料)を比較することで、導入の損益分岐点を明確に導き出せます。
関連記事:【2026年最新】生成AI料金比較!目的別おすすめツールとROIを最大化する選び方
【実装の壁】技術的・組織的課題をどう乗り越えるか
現場の技術者とAIエンジニアの溝を埋めることが、実装成功の鍵となります。
Sim-to-Real(仮想空間から実機)への移行精度を高めるポイント
仮想空間と現実世界の乖離(シミュレーションと実機のズレ)は最大の難所です。学習データを現実のセンサー値に合わせて随時微調整する「ドメインランダマイゼーション(学習データの多様化手法)」を徹底し、精度を確保しましょう。
ロボット技術者とAIエンジニアの橋渡しを成功させる組織設計
現場のロボット技術者は「安全性・安定性」を重視し、AIエンジニアは「精度・柔軟性」を重視します。両者の共通言語として「KPI(重要業績評価指標)」を定義し、例えば『把持成功率99.9%』という指標を共有することで、対立を防ぐことができます。
安全基準とリスクアセスメント:自律判断を行う機器の法規制対応
AIが自律判断を行う以上、予測不能な動きが発生する可能性があります。ISO等の国際安全規格に準拠し、一定範囲外に作業員が立ち入った場合は即座に安全停止するなどの「物理的・論理的ガードレール」を多重化することが法規制対応の必須事項です。
関連記事:【2026年最新版】OpenClawはなぜ危険なのか?リスクと安全な運用判断のポイント

【市場動向】大手メーカーの垂直統合戦略から読む勝ち筋
これからのメーカー選びは、AIプラットフォームとの接続性を重視すべきです。
NVIDIAプラットフォームと日系メーカーのハードウェアが描くエコシステム
現在、多くの産業ロボットメーカーがNVIDIAのアーキテクチャを採用しています。これにより、特定のメーカーに依存することなく、将来的に最新のAIモデルをプラグインのように差し替え可能な環境が整いつつあります。
自社が今すぐ着手すべき「判断軸」と優先順位の付け方
以下の優先順位で検討を進めてください。
1. データ収集の開始: 既存設備をIoT化し、今の状態を数値化する。
2. 小規模なPoC(概念実証): 特定工程でデジタルツインを試し、学習効果を測定する。
3. プラットフォーム連携の選定: 拡張性の高いAIプラットフォームに対応した機器を選定する。
関連記事:AIエージェントおすすめ10選|無料で試せる順に個人・法人別で比較

まとめ
フィジカルAIの導入は、単なる設備の買い替えではなく、工場全体を自律的なプラットフォームへと進化させる戦略的投資です。
- ハードウェア単体ではなく、AIプラットフォームとの統合を意識する。
- Phase 1(データ取得)からPhase 3(世界モデル活用)まで段階を踏む。
- ROIは労働力不足の解消と機会損失の回避を軸に算定する。
- 技術者とAIエンジニアの連携を組織的に構築する。
まずは現状の稼働データを可視化するPhase 1の準備から、今すぐ着手しましょう。